I am a PhD student in the VISION lab of Nanjing University (NJU) and I am advised by Zhan Ma (NJU). I am mostly interested in Point Cloud Compression using deep learning approaches.
09-2024
Unicorn Part I:Geometry paper has been accepted to TPAMI!09-2024
Unicorn Part II:Attribute paper has been accepted to TPAMI!12-2023
NeRI paper has been accepted to ICASSP 2024!11-2023
GR-Net paper has been accepted to TVCG 2023!09-2023
I'm starting my PhD in NJU!06-2023
I finish my B.S. in HDU!02-2024 / 11-2024
Guangdong Oppo Mobile Telecommunications Corporation Ltd (OPPO)Worked as a [Your Position] in the [Department/Team Name], focusing on [your key responsibilities]. Led and contributed to multiple projects related to [relevant technology/domain], optimizing [specific aspect] and improving [key metric or feature].
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024
@ARTICLE{10682566,
author={Wang, Jianqiang and Xue, Ruixiang and Li, Jiaxin and Ding, Dandan and Lin, Yi and Ma, Zhan},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
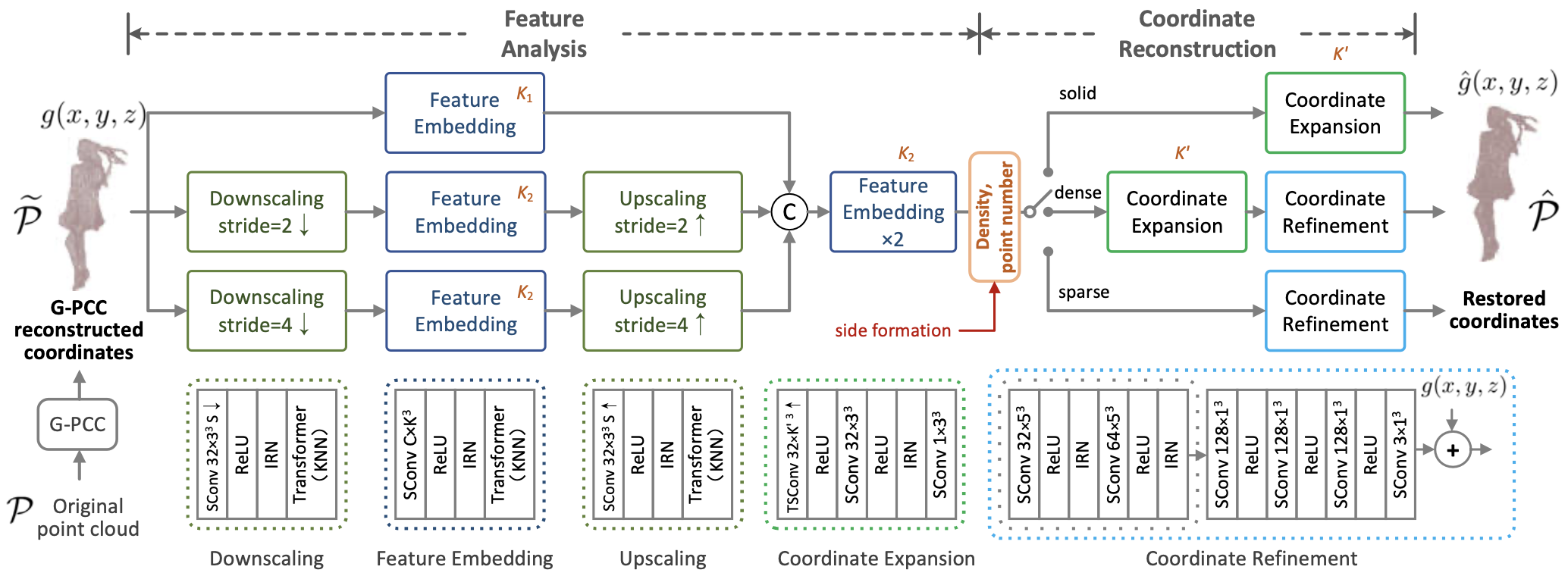
title={A Versatile Point Cloud Compressor Using Universal Multiscale Conditional Coding – Part II: Attribute},
year={2025},
volume={47},
number={1},
pages={252-268},
keywords={Geometry;Point cloud compression;Encoding;Tensors;Image color analysis;Image coding;Transform coding;Attribute;conditional coding;geometry;multiscale sparse representation;point cloud compression},
doi={10.1109/TPAMI.2024.3462945}}
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024
@ARTICLE{10682566,
author={Wang, Jianqiang and Xue, Ruixiang and Li, Jiaxin and Ding, Dandan and Lin, Yi and Ma, Zhan},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
title={A Versatile Point Cloud Compressor Using Universal Multiscale Conditional Coding – Part II: Attribute},
year={2025},
volume={47},
number={1},
pages={252-268},
keywords={Geometry;Point cloud compression;Encoding;Tensors;Image color analysis;Image coding;Transform coding;Attribute;conditional coding;geometry;multiscale sparse representation;point cloud compression},
doi={10.1109/TPAMI.2024.3462945}}
ICASSP 2024
@INPROCEEDINGS{10446596,
author={Xue, Ruixiang and Li, Jiaxin and Chen, Tong and Ding, Dandan and Cao, Xun and Ma, Zhan},
booktitle={ICASSP 2024 - 2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP)},
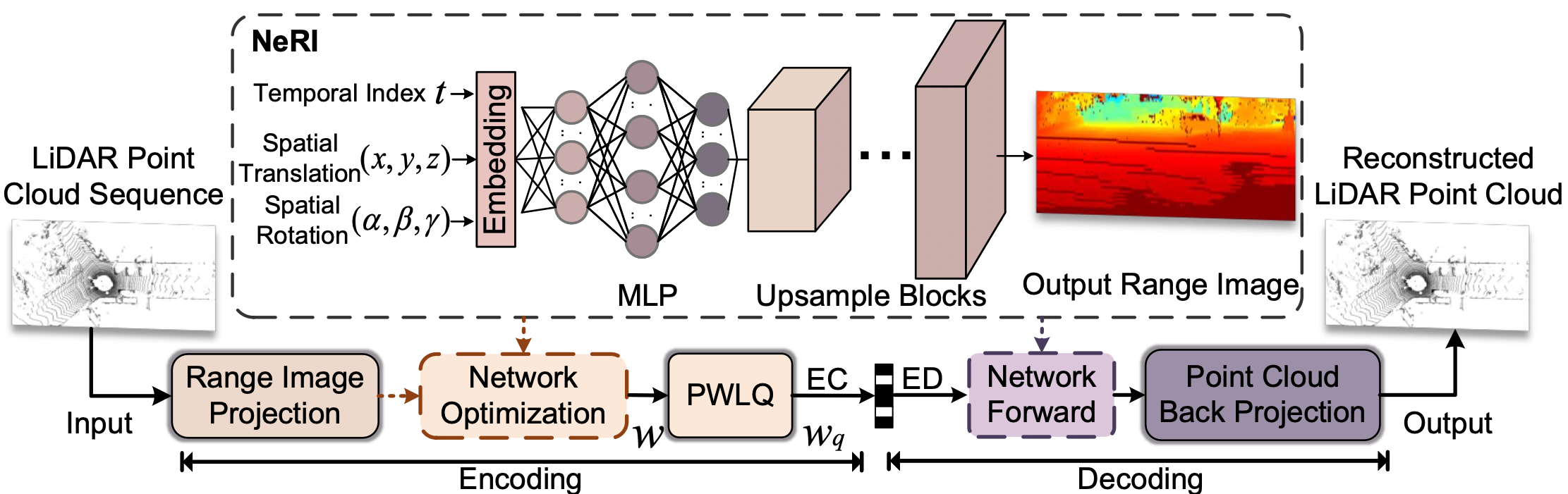
title={NeRI: Implicit Neural Representation of LiDAR Point Cloud Using Range Image Sequence},
year={2024},
volume={},
number={},
pages={8020-8024},
keywords={Point cloud compression;Laser radar;Image coding;Three-dimensional displays;Quantization (signal);Neural networks;Transforms;Point cloud geometry compression;LiDAR data;implicit neural representation;range image},
doi={10.1109/ICASSP48485.2024.10446596}}
TVCG 2023
@misc{guedon2023sugar,
title={SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering},
author={Antoine Guédon and Vincent Lepetit},
year={2023},
eprint={2311.12775},
archivePrefix={arXiv},
primaryClass={cs.GR}
}
@article{xue2022efficient,
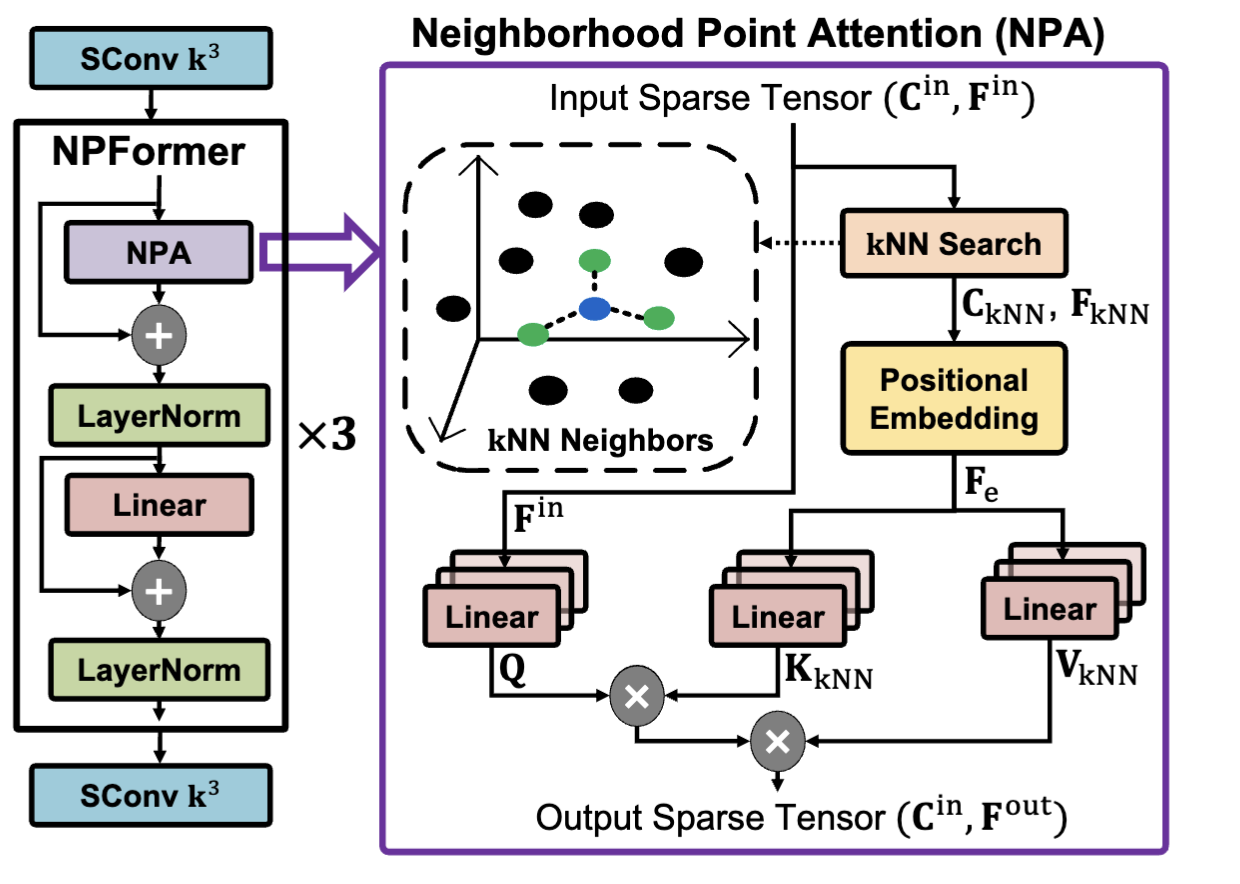
title={Efficient lidar point cloud geometry compression through neighborhood point attention},
author={Xue, Ruixiang and Wang, Jianqiang and Ma, Zhan},
journal={arXiv preprint arXiv:2208.12573},
year={2022}
}
© You are welcome to copy the code, please attribute the source with a link back to this page.
Template inspired from Tom Monnier and Mathis Petrovich.
